Connect m500 to PX4
SSH into VOXL
The VOXL’s IP address by default is 192.168.8.1. SSH into VOXL using the root user with password oelinux123.
More details available at the VOXL SSH quickstart page.
Edit voxl-vision-px4.conf
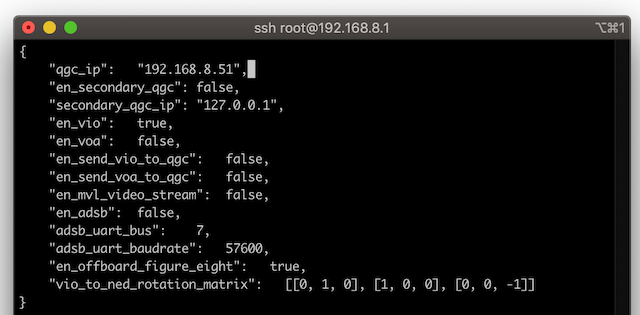
VOXL needs to know the IP address of your computer running qGroundControl. This is set in the ‘qgc_ip’ field of the /etc/modalai/voxl-vision-px4.conf file on VOXL. This will inform the voxl-vision-px4 systemd service to send MAVLink data to our computer.
Run the following command and update the qgc_ip field to match your computer’s IP.
yocto:/home/root# vi /etc/modalai/voxl-vision-px4.conf

Hit i to enter edit mode, use arrow keys to navigate to the qgc_ip field and edit there. To save, hit esc then :wq to write and quit.
If you put VOXL on your own WiFi or LTE network you will have to do the same procedure.
For more information on this config file and the options available see the VOXL Vision PX4 manual.
Restart the voxl-vision-px4 Service
To reset the voxl-vision-px4 service and reload the configuration, run the following command:
yocto:/home/root# systemctl restart voxl-vision-px4
Note this will also reset the Visual Inertial Odometry (VIO) algorithm and reset VIO’s origin to wherever the drone is when you reset the service.
Connect m500 to QGroundControl
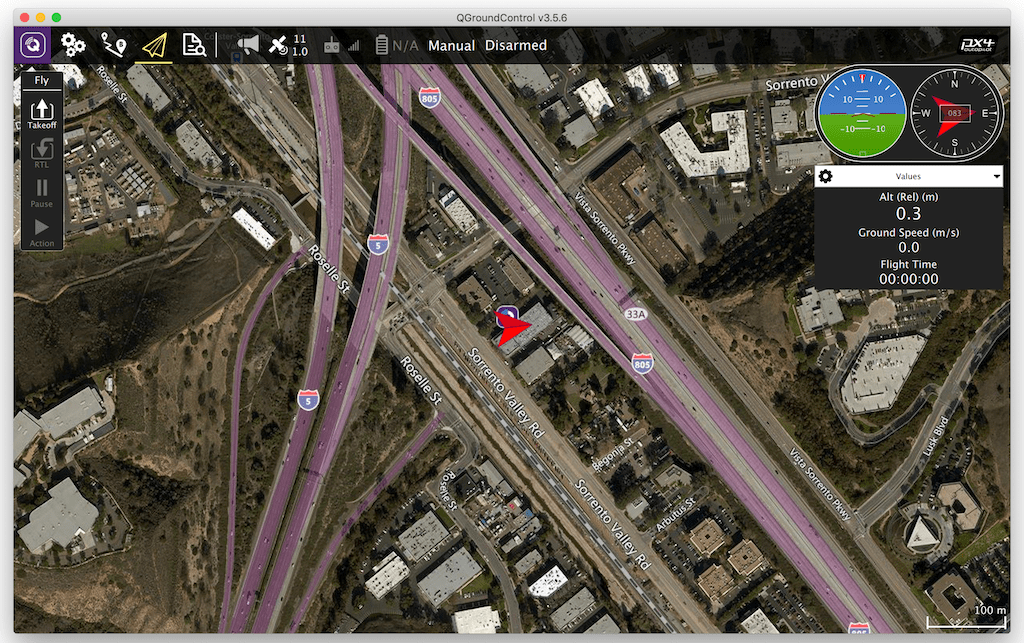
Confirm Connection with QGroundControl
After the previous step is completed, the vehicle should automatically connect to QGroundControl
Connecting LTE Modems
For more information on setting up Microhard or LTE modems on your m500, follow the instructions Here