VOXL 2 PX4 Developer Guide
Table of contents
Preface
This guide is geared towards someone interested in all the bits and bytes that make PX4 on VOXL 2 work. If you are looking instead for a general user’s guide, please refer to the VOXL 2 PX4 User Guide
Introduction
VOXL 2 is a flight controller that runs PX4. On VOXL 2, it runs flight critical parts of PX4 software on a real time DSP, and other parts in Ubuntu 18.04 Linux on an 8 core 64-bit ARMv8 processor.
Typical of other flight controllers, there are connectors for external sensors, power, and ESC actuation. There are sensors like IMUs and barometers, file systems for logging flights, and interfaces for connecting to ground control stations.
But unlike most other flight controllers, PX4 is actually also running in a companion computer with that is capable of doing things like stream 7 image sensors simultaneously for computer vision and support multiple data links like 5G. Although we will use the companion computer as a “front end” in some of the instructions below, the other guides here (TODO) contain more detailed usage of that part of the system.
For the PX4 Developer
If you are a PX4 developer who is used to developing on microcontollers. On VOXL 2:
- PX4 is installed using
aptpackage manager (see boards/modalai/rb5-flight/debian/DEBIAN/ to see how) - Connection to QGC is over IP, not USB or serial
- The Non-RTOS parts of PX4 run in Ubuntu 18 (on the applications processor), these are defined boards/modalai/rb5-flight/default.cmake, and can be built in a docker container available here
- The RTOS parts of PX4 run in an RTOS called QuRT (on the sensors DSP), these are defined boards/modalai/rb5-flight/qurt.cmake, and can be built in the same docker container available here
- PX4 is installed via the VOXL SDK (aka voxl-suite), and this guide is meant to allow users to customize this component.
- You currently cannot install the PX4 for SLPI build via QGroundControl
- The ‘guest OS’ firmware that runs in the sDSP is included in the system image, providing access to the drivers for UART/I2C/SPI etc.
- When you are connected to VOXL 2’s shell, all the normal PX4 command (like
listener) get apx4-prefix, e.g. to use thelistenercommand, trypx4-listener
Key PX4 Differences to Note
- Currently, there’s no connection from QGroundControl to PX4 through the USBC connector
- The USBC connection provides ADB access only, which brings you to a shell and you can interface with PX4 command line from Linux
- Communications from VOXL 2 to the ground station are over IP. Please see the Connecting Quickstart
Block Diagram - Details
The following provides details about the architecture:
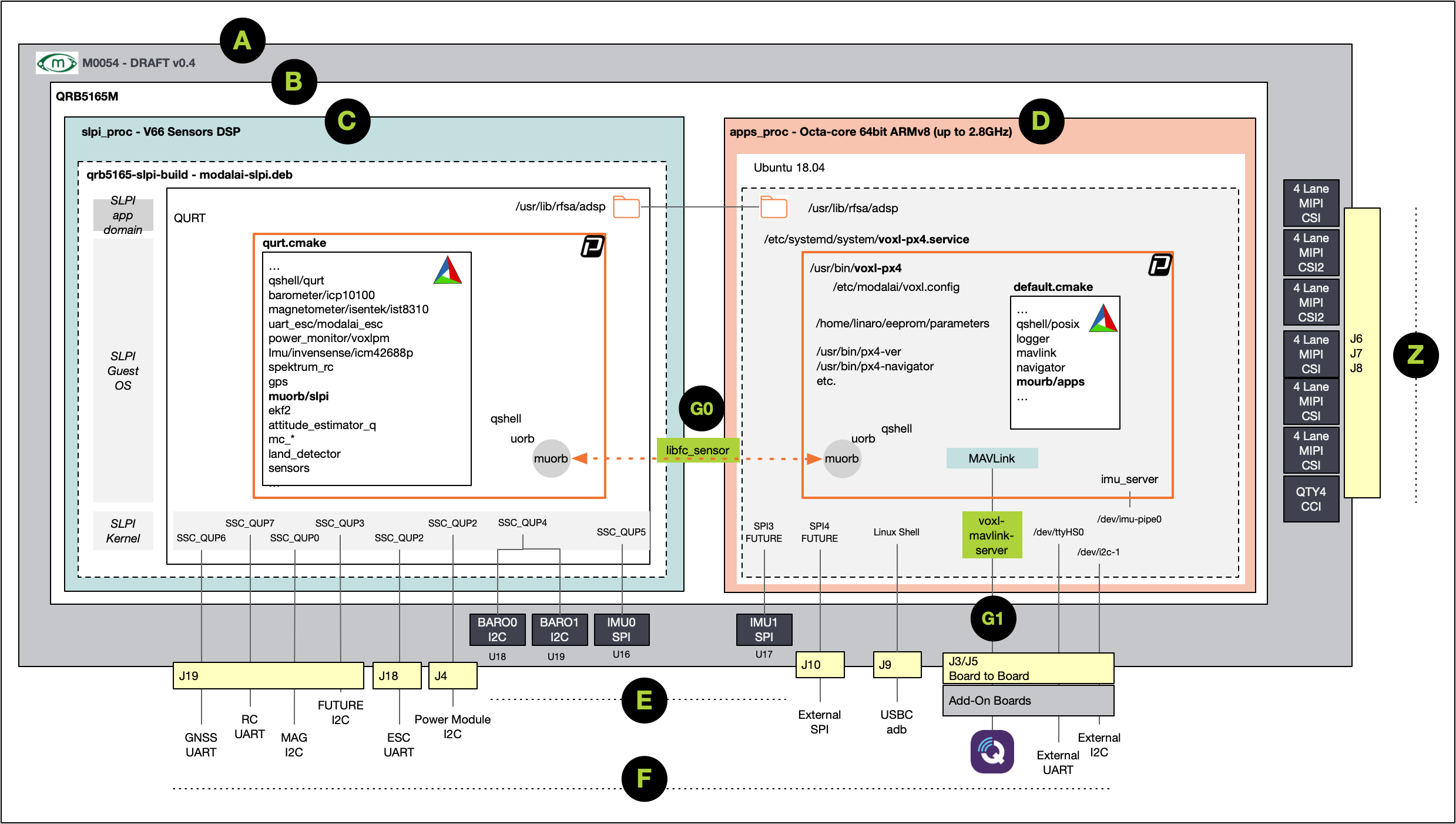
Component Walkthrough
Processors
| ID | Name | Description |
|---|---|---|
| A | M0054 or VOXL 2 | The entire PCBA, containing the QRB5165M SIP, sensors, connectors, etc. |
| B | QRB5165M | The system in package (SIP) populated on M0054 containing all the processors listed below |
| C | spli_proc or sDSP | Sensors DSP (dDSP) - Hexagon V66 - also called Sensors Low Power Island (slpi) |
runs PX4 code built for Qualcomm’s Hexagon DSP RTOS (QuRT) specified in qurt.cmake | ||
| D | apps_proc | CPU, Applications Processor, 8-core 64-bit ARM v8. Ubuntu 18.04, Kernel 4.19 |
runs PX4 code built for Linux/POSIX specified in default.cmake | ||
aDSP | Audio DSP (aDSP) - Hexagon V66, not used by PX4, not shown on graphic | |
cDSP | Compute DSP (cDSP) Hexagon V66Q - not used by PX4, not shown on graphic | |
GPU | Qualcomm® Adreno™ 650 - not used by PX4, not shown on graphic | |
NPU | Qualcomm® NPU230 - not used by PX4, not shown on graphic |
Onboard Sensors
| ID | Name | Description |
|---|---|---|
| E - U16 | IMU0 (slpi) | ICM-42688p ([src/drivers/imu/invensense/icm42688p]) |
| E - U17 | IMU1 (apps_proc) | ICM-42688p ([src/drivers/imu/invensense/icm42688p]) |
| E - U18 | BARO0 (slpi) | BMP-388 ([src/drivers/barometer/bmp388]) |
| E - U19 | BARO1 (slpi) | ICP-10100 ([src/drivers/barometer/icp10100]) |
External Sensors and Interfaces
For detailed pinouts, please reference the VOXL 2 connectors page.
| ID | Name | Description |
|---|---|---|
| F - J19 | RC UART | for example Spektrum |
| F - J19 | GNSS UART | for example Ublox Neo-M8N |
| F - J19 | MAG I2C | for example IST8310 |
| F - J19 | Future I2C | not yet available |
| F - J18 | UART ESC | UART for ModalAI 4-in-1 ESC ([src/drivers/uart_esc/modalai_esc]) |
| F - J4 | Power Module I2C | I2C for ModalAI Power Module ([src/drivers/power_monitoring/voxlpm]) |
| F - J10 | External SPI | Future |
| F - J9 | USBC | adb connection |
| F - J3/J5 | Board to Board | For add-on boards, USB 2.0 hub, USB 3.0 hub, UART, I2C, etc |
Software Interfaces
| ID | Name | Description |
|---|---|---|
| G0 | libfc_sensor | Facilitates UORB communication between the apps_proc and slpi_proc |
| G1 | MAVLink / IP | Using the networking stack on the apps_proc, MAVLink connections are facilitated over IP |
Image Sensor Interfaces
Shown called out as Z, QTY6 4-lane MIPI-CSI2 + QTY4 CCI interfaces are available via the J6, J7 and J8 connectors. See VOXL 2 camera configs for more details.
Theory of Operation
Startup
- A service defined by
/etc/systemd/system/voxl-px4.serviceis started on bootup by systemd - The
voxl-px4.serviceruns thevoxl-px4bash script which serves as a CLI wrapper utility for startingpx4 - Before starting
px4, if the PX4 parameters are not present in/data/px4/parameters, they are initialized by/etc/modalai/voxl-px4-set-default-parameters.config - A
px4instance is then started as a daemon process, executing the startup script defined by/etc/modalai/voxl-px4.config
Common Use Cases
How to Access the PX4 Shell (pxh)
You can access the PX4 shell from the VOXL2 command line by using a px4- prefix on commands, which will route them to the PX4 daemon process.
Sometimes, it’s easier to debug and get access to the PX4 shell by instead running PX4 as a process:
- adb onto VOXL2
adb shell
voxl2:/$
- disable the
voxl-px4deamon by runningsystemctl disable voxl-px4
voxl2:/$ systemctl disable voxl-px4
Removed /etc/systemd/system/multi-user.target.wants/voxl-px4.service.
- also disable
voxl-mavlink-serverusingsystemctl disable voxl-mavlink-serverwhich can startvoxl-px4as a dependency
voxl2:/$ systemctl disable voxl-mavlink-server
Removed /etc/systemd/system/multi-user.target.wants/voxl-mavlink-server.service.
- reboot VOXL2
exit
adb reboot
- adb back on VOXL2
adb shell
voxl2:/$
- manually run
voxl-px4
voxl2:/$ voxl-px4
Found DSP signature file
INFO [px4] mlockall() enabled. PX4's virtual address space is locked into RAM.
INFO [px4] assuming working directory is rootfs, no symlinks needed.
______ __ __ ___
| ___ \ \ \ / / / |
| |_/ / \ V / / /| |
| __/ / \ / /_| |
| | / /^\ \ \___ |
\_| \/ \/ |_/
px4 starting.
INFO [px4] Calling startup script: /bin/sh /etc/modalai/voxl-px4.config 0
Running on M0054
...
- Hit ENTER to get the shell to show up after the console stops updating
...
INFO [uorb] Advertising remote topic vehicle_attitude
INFO [uorb] Advertising remote topic vehicle_attitude_setpoint
INFO [uorb] Advertising remote topic vehicle_rates_setpoint
pxh>
- Some drivers run on the applications processor. You can issue these commands directly, like:
pxh> commander status
INFO [commander] arming: STANDBY
- Some drivers run on the DSP, and can be accessed using
qshelllike:
qshell px4io status
...
INFO [muorb] SLPI: Direct PWM values: 0 0 0 0 0 0 0 0
INFO [muorb] SLPI: Ok executing command: px4io status
INFO [muorb] SLPI: Sending qshell retval with timestamp 151805206, current timestamp 151805206
INFO [qshell] qshell return value timestamp: 151805206, local time: 151808943
Show a PX4 Parameter
px4-param show | grep UART
Backup Parameters from Device
The parameters are stored in /data/px4/param/parameters.
Spin Motors
Using UART ESC
The following would spin, sequentially, PX4 motors 1, 2, 3 and 4 at 1000 RPM for ~1 second.
px4-qshell modalai_esc -i 1 -r 1000 rpm
px4-qshell modalai_esc -i 2 -r 1000 rpm
px4-qshell modalai_esc -i 4 -r 1000 rpm
px4-qshell modalai_esc -i 8 -r 1000 rpm
View uORB Data
voxl2:/$ px4-listener sensor_accel
TOPIC: sensor_accel
sensor_accel_s
timestamp: 126098074 (0.002515 seconds ago)
timestamp_sample: 126097753 (321 us before timestamp)
y: -0.2508
z: -9.7809
temperature: 32.4728
error_count: 0
clip_counter: [0, 0, 0]
Other useful topics:
px4-listener sensor_accelpx4-listener sensor_gyropx4-listener sensor_gpspx4-listener sensor_baropx4-listener battery_statuspx4-listener input_rc
Source Code
The current PX4 branch is here.
To build, see the docker container project available here