Mavlink Routing on VOXL
Mavlink routing on VOXL is handled by voxl-mavlink-server which routes mavlink messages between the autopilot, MPA services, and ground control stations.
Up to 16 simultaneous external UDP connections can be established with voxl-mavlink-server. These can be connections to qGroundControl, MAVROS, MAVSDK, or any custom software on the same network as VOXL. voxl-mavlink-server listens for mavlink heartbeats on the standard mavlink port 14550 and opens a new link when it receives a heartbeat from a new IP. Each link receives all mavlink data coming from the autopilot and any messages received on the UDP port will be forwarded to the autopilot.
Connecting VOXL to a Ground Control Station
There are two ways to initiate a connection between VOXL and a ground control station. Choose which method suites your preference and spefic use case.
Initiating Connection to VOXL from QGroundControl
If you know the IP address of VOXL, you can point your GCS to VOXL’s IP and initiate a connection with no configuration of VOXL whatsoever.
First you can determine the IP address of VOXL by using ADB shell over a USB cable and using the voxl-my-ip tool or standard Linux tools like ifconfig.
voxl2:/$ voxl-my-ip
wlan0: 192.168.1.225
In QGroundControl add VOXL’s IP Address as a UDP connection in the Application Settings > Comm Links menu. Unless you expect to have multiple drones turned on on the same network at the same time, I suggest enabling the ‘automatically connect on start’ feature here.
Note, after typing in the IP address, you MUST click the add server button in QGroundControl.
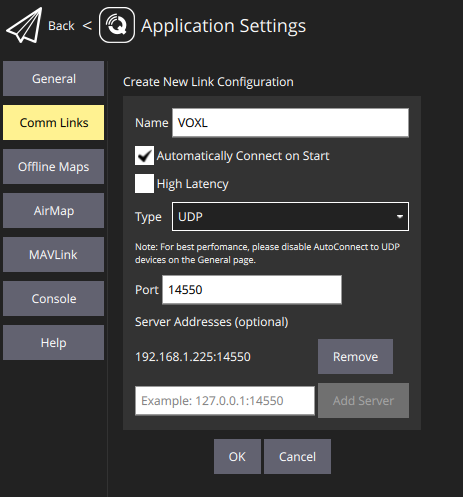
Once you’ve saved the connection information. Click the connect button.
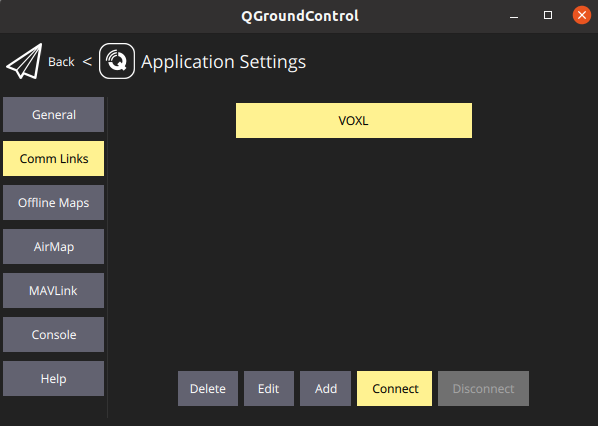
Then you can navigate back to the QGroundControl main window and you should be connected!
Initializing Connection to QGroundControl from VOXL
If you have a network architecture where the VOXL changes IP frequently but the GCS is at a static IP, then you can alternatively configure VOXL to initiate the connection to the GCS. To do this, add your GCS IP address to VOXL’s /etc/modalai/voxl-mavlink-server.conf configuration file.
voxl2:/$ nano /etc/modalai/voxl-mavlink-server.conf
"primary_static_gcs_ip": "192.168.8.10",
"secondary_static_gcs_ip": "192.168.8.11",
Then restart the mavlink server to load in the new config file.
voxl2:/$ systemctl restart voxl-mavlink-server
Note there are two fields allowing you to enter the IPs of up to two ground control stations. This is useful if you have both a desktop in the office and a laptop for field use. Note that the two default IPs in this config file are 192.168.8.10 192.168.8.11. These are the first two IPs that will be assigned by VOXL’s DHCP server when devices connect to VOXL’s SoftAP wireless network. This is what allows a GCS to auto-connect to VOXL when using SoftAP WiFi mode.
We suggest Leaving the primary ip as 192.168.8.10 so as to not disable the SoftAP auto connect functionality. Usually you will want to set your main GCS IP address to the secondary slot. There is no practical different between the primary and secondary slots, they both function the same and are only differentiated by name.
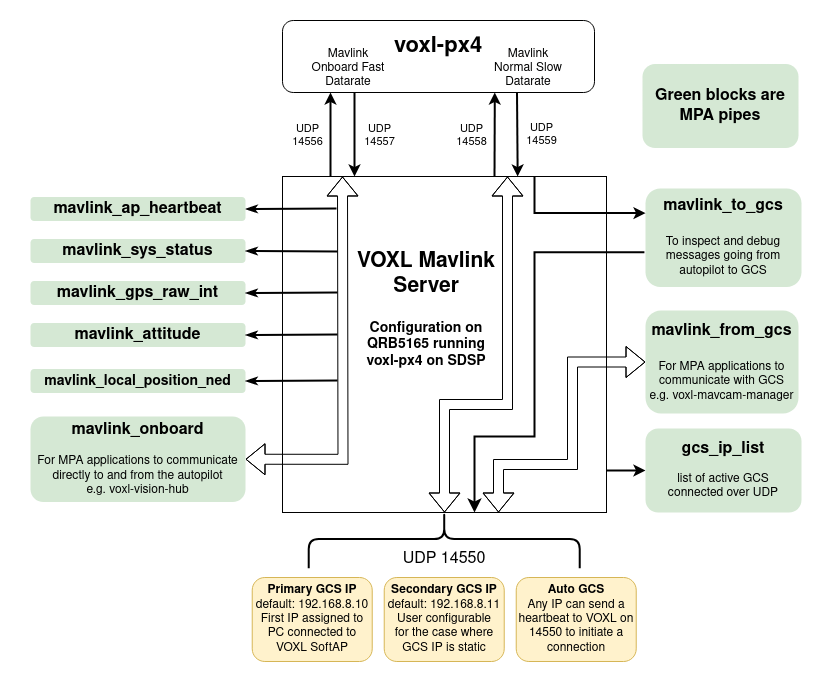
Routing Paths (QRB5165 SDSP Mode)
QRB5165 based systems (VOXL2 and VOXL2-mini) running voxl-px4 on the SDSP have two parallel mavlink streams running between the autopilot and voxl-mavlink-server. This allows very high datarate messages (aka ‘Onboard Mode’) to be sent from the autopilot to local services running on VOXL through MPA.
A second low datarate stream (aka ‘Normal Mode’) is then transmitted to ground control stations over UDP. This data stream is still available for MPA services to inspect via the mavlink_to_gcs pipe. MPA services can also communicate directly with the GCS though the mavlink_from_gcs pipe.
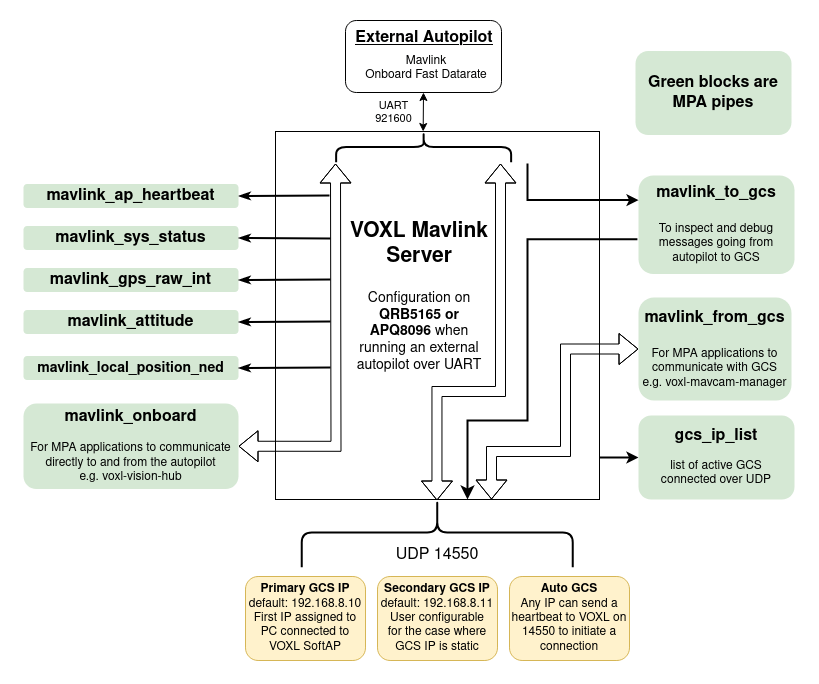
Routing Paths (External Autopilot Mode)
On both QRB5165 and APQ8096 based systems where the user has connected an external Autopilot Via a UART port, the single mavlink stream is shared for both onboard and GCS communication. Note it is up to the user to configure the desired datarate on their own external Autopilot.
For information on how to connect an external flight controller to VOXL2, go here.
Debugging with voxl-inspect-mavlink
voxl-inspect-mavlink will show the mavlink message types and rates being published on any of the 8 pipes described abote in the Routing Paths section.
For example, to see the full datarate ‘onboard mode’ messages being published by the Autopilot for use by onboard services, run the following:
voxl2:/$ voxl-inspect-mavlink mavlink_onboard
| ID | Mavlink MSG Name |Counter| Hz |
|-------|-----------------------------|-------|------|
| 0 | heartbeat | 4 | 1.1 |
| 1 | sys_status | 18 | 5.0 |
| 2 | system_time | 4 | 1.1 |
| 4 | ping | 4 | 1.1 |
| 8 | link_node_status | 4 | 1.1 |
| 24 | gps_raw_int | 29 | 8.0 |
| 29 | scaled_pressure | 4 | 1.1 |
| 30 | attitude | 36 | 10.0 |
| 31 | attitude_quaternion | 36 | 10.0 |
| 32 | local_position_ned | 109 | 30.2 |
| 36 | servo_output_raw | 36 | 10.0 |
| 65 | rc_channels | 72 | 20.0 |
| 74 | vfr_hud | 36 | 10.0 |
| 83 | attitude_target | 36 | 10.0 |
| 85 | position_target_local_ned | 36 | 10.0 |
| 105 | highres_imu | 36 | 10.0 |
| 141 | altitude | 36 | 10.0 |
| 147 | battery_status | 2 | 0.6 |
| 230 | estimator_status | 4 | 1.1 |
| 241 | vibration | 2 | 0.6 |
| 245 | extended_sys_state | 18 | 5.0 |
| 290 | esc_info | 36 | 10.0 |
| 291 | esc_status | 36 | 10.0 |
| 331 | odometry | 108 | 29.9 |
| 380 | time_estimate_to_target | 3 | 0.8 |
| 411 | current_event_sequence | 1 | 0.3 |
| 12901 | open_drone_id_location | 4 | 1.1 |
Or to simply show that heartbeats are being broadcast by the autopilot:
voxl2:/$ voxl-inspect-mavlink mavlink_ap_heartbeat
| ID | Mavlink MSG Name |Counter| Hz |
|-------|-----------------------------|-------|------|
| 0 | heartbeat | 8 | 1.1 |
You can also see the much lower datarate packets going from the autopilot to the GCS. Note that this will show data even without a GCS connected since the autopilot broadcasts this data at all times.
voxl2:/$ voxl-inspect-mavlink mavlink_to_gcs
| ID | Mavlink MSG Name |Counter| Hz |
|-------|-----------------------------|-------|------|
| 0 | heartbeat | 8 | 1.1 |
| 1 | sys_status | 8 | 1.1 |
| 4 | ping | 1 | 0.1 |
| 8 | link_node_status | 7 | 0.9 |
| 24 | gps_raw_int | 7 | 0.9 |
| 29 | scaled_pressure | 8 | 1.1 |
| 30 | attitude | 111 | 14.9 |
| 31 | attitude_quaternion | 75 | 10.1 |
| 32 | local_position_ned | 8 | 1.1 |
| 36 | servo_output_raw | 8 | 1.1 |
| 65 | rc_channels | 38 | 5.1 |
| 74 | vfr_hud | 30 | 4.0 |
| 83 | attitude_target | 15 | 2.0 |
| 85 | position_target_local_ned | 11 | 1.5 |
| 141 | altitude | 8 | 1.1 |
| 147 | battery_status | 4 | 0.5 |
| 230 | estimator_status | 4 | 0.5 |
| 241 | vibration | 1 | 0.1 |
| 245 | extended_sys_state | 8 | 1.1 |
| 290 | esc_info | 8 | 1.1 |
| 291 | esc_status | 8 | 1.1 |
| 380 | time_estimate_to_target | 7 | 0.9 |
| 411 | current_event_sequence | 3 | 0.4 |
| 12901 | open_drone_id_location | 8 | 1.1 |
You will, however, only see data coming from the GCS on the mavlink_from_gcs pipe once a GCS connects. Usually the GCS just sends a heartbeat once per second and a ping every 10 seconds. However, if you open voxl-inspect-mavlink BEFORE opening the GCS, you can see the variety of messages the GCS sends over during initial connection.
Of note is the param_request_list message which triggers the param dump from the autopilot to the GCS on initial connection. Also the initial several command_long messages are mavlink commands requesting information about the camera capabilities and requesting the RTSP video stream URL.
You can have two windows open at once inspecting both mavlink_from_gcs and mavlink_to_gcs to help debug if custom commands and command ACKs are being send back and forth.
voxl2:/$ voxl-inspect-mavlink mavlink_from_gcs
| ID | Mavlink MSG Name |Counter| Hz |
|-------|-----------------------------|-------|------|
| 0 | heartbeat | 26 | 1.1 |
| 2 | system_time | 2 | 0.1 |
| 4 | ping | 1 | 0.0 |
| 21 | param_request_list | 1 | 0.0 |
| 23 | param_set | 1 | 0.0 |
| 43 | mission_request_list | 3 | 0.1 |
| 47 | mission_ack | 3 | 0.1 |
| 76 | command_long | 9 | 0.4 |
voxl-mavlink-server Configuration File
/**
* voxl-mavlink-server Configuration File
*
* primary_static_gcs_ip & secondary_static_gcs_ip
* These configure voxl-mavlink-server to automatically try to connect to
* up to two known static GCS units. Set to empty or NULL if you don't want
* to use this and you want the GCS to initialize the connection instead.
* Note the default IP for the primary link is 192.168.8.10 which is the
* first IP that VOXL DHCP serves when connecting in wifi softap mode.
*
*
* Settings for running voxl-px4 on SLPI:
* onboard_port_to_autopilot - UDP port to send high-rate onboard data to SLPI
* onboard_port_from_autopilot - UDP port to receive high-rate onboard data from SLPI
* gcs_port_to_autopilot - UDP port to send normal-rate gcs data to SLPI
* gcs_port_from_autopilot - UDP port to receive normal-rate gcs data from SLPI
*
* Settings for running an external autopilot connected via UART:
* en_external_uart_ap - set to true to enable an external flight controller
* autopilot_uart_bus - uart bus, default 1 for VOXL2
* autopilot_uart_baudrate - default 921600
* en_external_fc_timesync - enable responding to timesync messages
* (enabled by default)
* en_external_ap_heartbeat - enable automatic sending of heartbeat
* gcs_timeout_s - time without heartbeat to consider GCS disconnected
*
* udp_mtu - maximum transfer unit for UDP packets back to GCS. voxl-mavlink-server
* will bundle up backets for the GCS into a single UDP packet with
* a maxium size of this. This saves network traffic drastically.
* Set to 0 to disable this feature and send one UDP packet per msg.
*
*
* External FC field is for QRB5165 only. Set to true to enable UART
* communication to an external flight controller, otherwise a UDP interface
* will be started to talk to voxl-autopilot on localhost which is the default behavior.
*
*/
{
"primary_static_gcs_ip": "192.168.8.10",
"secondary_static_gcs_ip": "192.168.8.11",
"onboard_port_to_autopilot": 14556,
"onboard_port_from_autopilot": 14557,
"gcs_port_to_autopilot": 14558,
"gcs_port_from_autopilot": 14559,
"en_external_uart_ap": false,
"autopilot_uart_bus": 1,
"autopilot_uart_baudrate": 921600,
"en_external_ap_timesync": 1,
"en_external_ap_heartbeat": 1,
"udp_mtu": 0,
"gcs_timeout_s": 4.5
}
voxl-mavlink-server debug modes
voxl2:/$ voxl-mavlink-server --help
voxl-mavlink-server usually runs as a systemd background service. However, for debug
purposes it can be started from the command line manually with any of the following
debug options. When started from the command line, voxl-mavlink-server will automatically
stop the background service so you don't have to stop it manually
-c, --load_config_only Load the config file and then exit right away.
This also adds new defaults if necessary. This is used
by voxl-configure-voxl-px4 to make sure the config file
is up to date without actually starting this service.
-h, --help Print this help text
-i, --debug_pipe_recv show debug info on messages coming from MPA
-j, --debug_pipe_send show debug info on messages sending to MPA
-k, --debug_ap_recv show debug info on messages coming from autopilot
-l, --debug_ap_send show debug info on messages sending to autopilot
-m, --debug_gcs_recv show debug info on messages coming from GCS
-n, --debug_gcs_send show debug info on messages sending to GCS
-t, --debug_timesync show debug info on the timesync protocol handling
-z, --debug_send_recv show debug info on all sent and received messages
Mavlink Headers
ModalAI bundles up the official MAVlink headers into a deb (and ipk) package called voxl-mavlink for distribution in voxl-suite for easy distribution and building projects in the VOXL ecosystem. The source code for the voxl-mavlink package can be found here.
Next: Streaming Video to QGroundControl