VOXL Functional Description
Table of contents
Overview
High level specifications of the platform
- Base Operation System: Linux Yocto Jethro with 3.18 kernel. Additional Linux Operating Systems can be used by running Docker on VOXL, details here
- Qualcomm Snapdragon 821 w/ 4GB LPDDR4 1866MHz
- Quad-core CPU up to 2.15GHz
- Adreno 530 GPU at 624MHz
- Hexagon compute DSP (cDSP) 825MHz
- Hexagon sensor DSP (sDSP) 700MHz
- 4k30 Video Capture h.264/5 w/ 720p FPV
- PCB 36mm x 75mm, 12-layer, 1mm thick
Camera
VOXL supports the following camera interfaces:
- MIPI-CSI2
- USB UVC
- HDMI
Please see the Camera and Video Guides for more detailed information.
Connectivity and Location
- Embedded pre-certified Wi-Fi module QCNFA324
- QCA6174A modem
- 802.11ac 2x2 Dual-band
- US FCC ID:PPD-QCNFA324
- Japan MIC ID: 003-140224
- 4G LTE as optional add-on module
- Microhard pDDL as an optional add-on module
- WGR7640 GNSS 10Hz
- I/O:
- 1x USB3.0 OTG (ADB port)
- 1x USB2.0 (expansion port)
- 2x UART
- 3x I2C
- Additional GPIO and SPI can be configured
Storage
- 32GB (UFS 2.0)
- Micro SD Card SDXC Version 3.0 up to 2TB
Software
- Docker with Ubuntu, Debian or Alpine
- OpenCV 2.4.11, 3.4.6, 4.2
- ROS Indigo
- Qualcomm Navigator 1.0 Flight Control
- Qualcomm Machine Vision SDK
Power Specifications
The VOXL should be powered by a supply rated at 6A and 5VDC.
A recomended power supply is defined here.
- Caution: although the VOXL may power up from USB power, it is not recommended to operate this way.
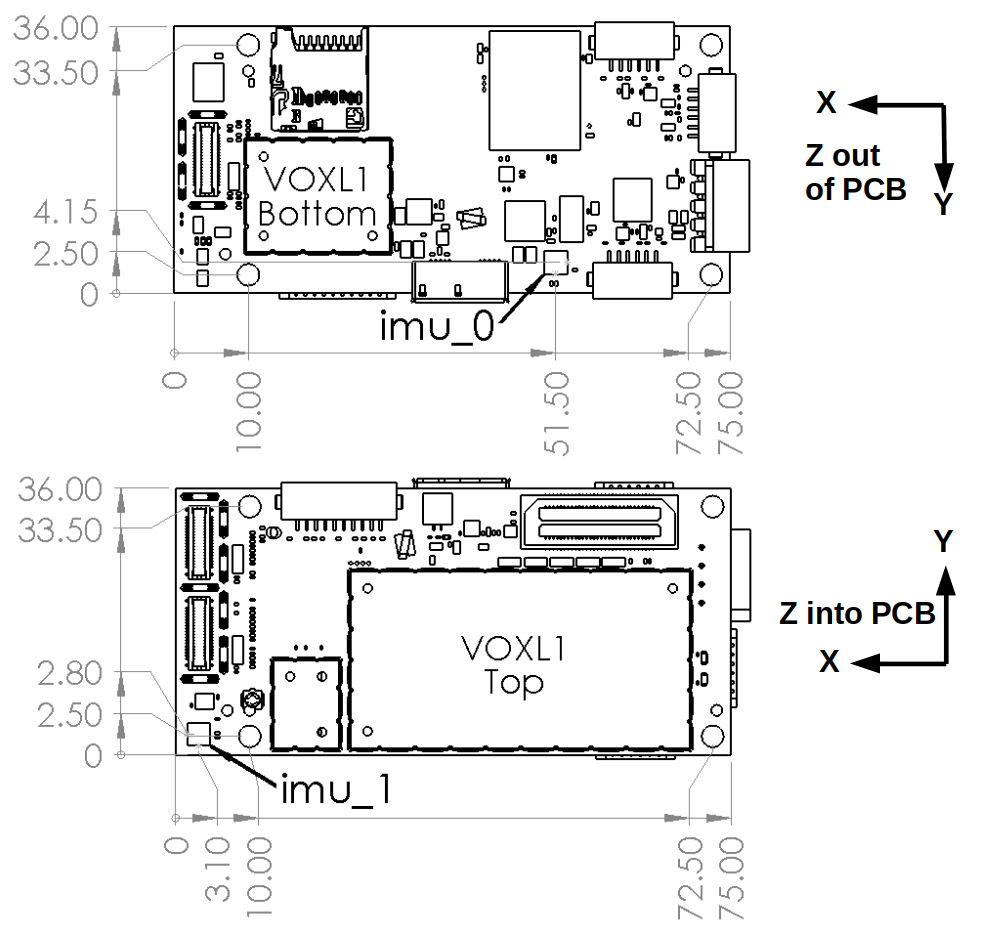
Mechanical Specifications
3D STEP File
Board Dimensions
Note the XYZ axis as drawn respresent the IMU data as reported by the voxl-imu-server MPA service, not the physical orientation of the IMU on the PCB. This aligns with the FRD reference frame when mounted on a drone in the typical orientation such as on the M500 reference drone.
On board sensors
| Configuration | VOXL (M0006) | VOXL Legacy aka Qualcomm Flight Pro (HA942) | Interface |
|---|---|---|---|
| IMU0 | ICM20948 | MPU9250 | SPI10 |
| IMU1 (recommended) | ICM20948 | MPU9250 | SPI1 |
| Barometer | Bosch BMP280 | Bosch BMP280 | i2c3 |
| GNSS | Internal Snapdragon | Internal Snapdragon | TBD |
IMU Notes
Note: IMU1 consistently performs better than IMU0. IMU1 is strongly recommended for flight and VIO use. This differs from the VOXL Flight board where IMU0 should be used instead. Configuring MPA services with voxl-configure-mpa will select the correct IMU based on board part number.