VOXL 2 Connecting an External Flight Controller
Table of contents
- Summary
- UART Communication Options
- Hardware Setup
- VOXL SDK Software Setup
- pymavlink Software Based Example
Summary
Although VOXL 2 has the capability to run PX4 in a real time DSP, some use cases call for an external flight controller.
UART Communication Options
You can communicate between a flight controller TELEM port and a VOXL 2 UART port. For example, Flight Core has a default telemetry port on J5 with a MavLINK instance running at 57600 baud.
Starting in System Image 1.3, there are 3 applications processor UARTs exposed. Additionally, there are 3 DSP UARTs used by PX4, that will be made available in future softwware releases via and API or similar.
| UART | Connector | Add-On / Adapter |
|---|---|---|
/dev/ttyHS0 | J8, camera group 2 | M0076 with hand soldering to test points |
/dev/ttyHS1 | J3, Board to Board | M0125 / Purchase Here |
/dev/ttyHS2 | J5, HS Board to Board | M0090 / Purchase Here |
Hardware Setup
Using USB/UART Addon Board (M0125)
In the following example, we’ll add the USB3/UART Add-On Board (M0125) to VOXL 2 (M0054) which gives us a 4 pin JST GH connector with a UART availabe at /dev/ttyHS1 from the applications processor.
Using MCBL-00067-1, connect from M0125’s J3 to Flight Core’s (v1/v2) (M0018/M0087) J5, TELEM1/TELEM2 (respectively).
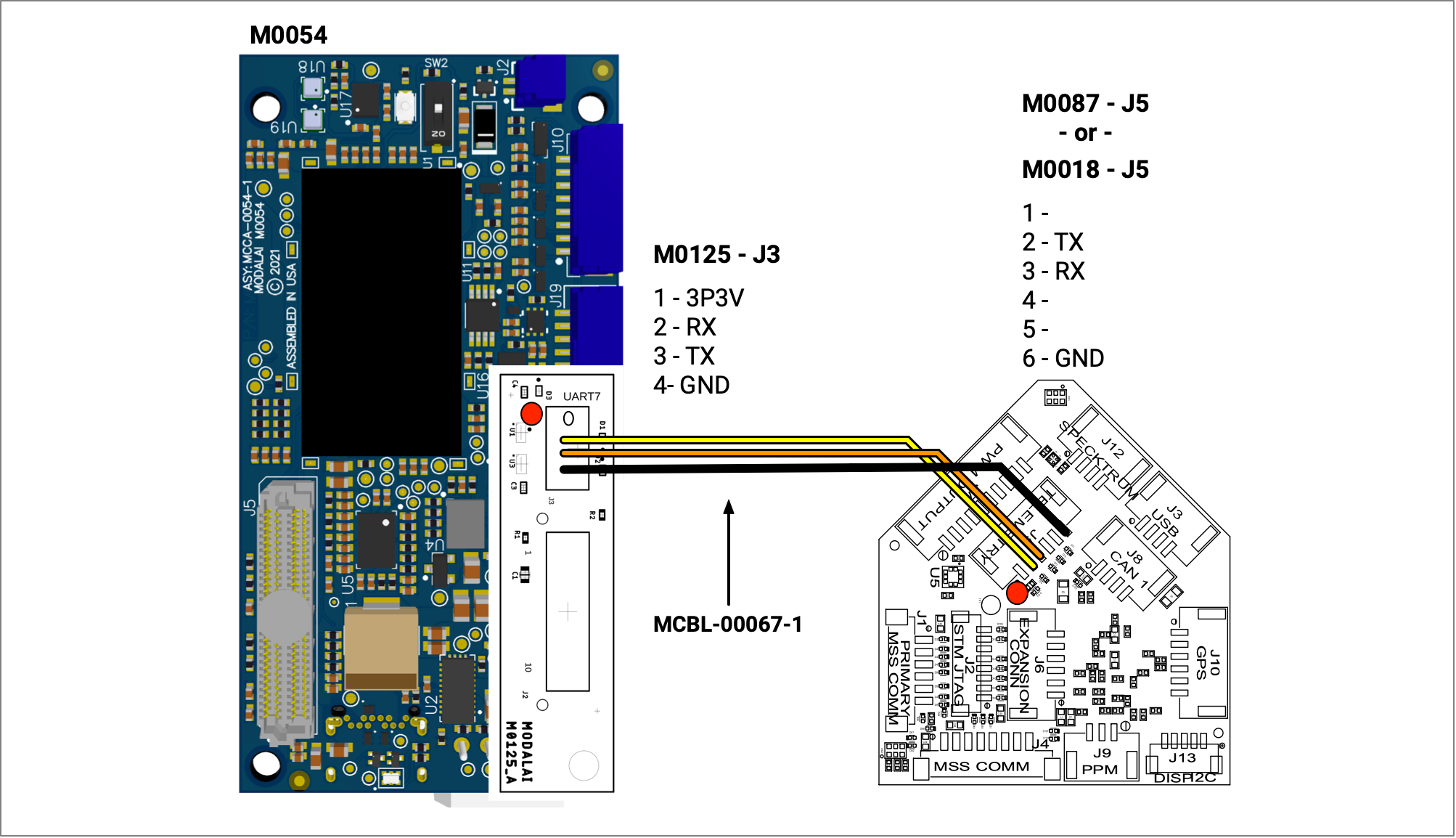
| M0125 J3 | M0018 J5 |
|---|---|
| 1 | |
| 2 RX | 2 TX |
| 3 TX | 3 RX |
| 4 GND | 6 GND |
Using M.2 5G Modem Addon Board (M0090)
The VOXL2 (M0054) can have the M.2 5G Modem Board Addon attached, which exposes a UART on M0090 - J9 that is accessible in VOXL2’s application processor as /dev/ttyHS2.
Using MCBL-00066-1, connect from M0090’s J9 to Flight Core’s (v1/v2) (M0018/M0087) J5, TELEM1/TELEM2 (respectively).
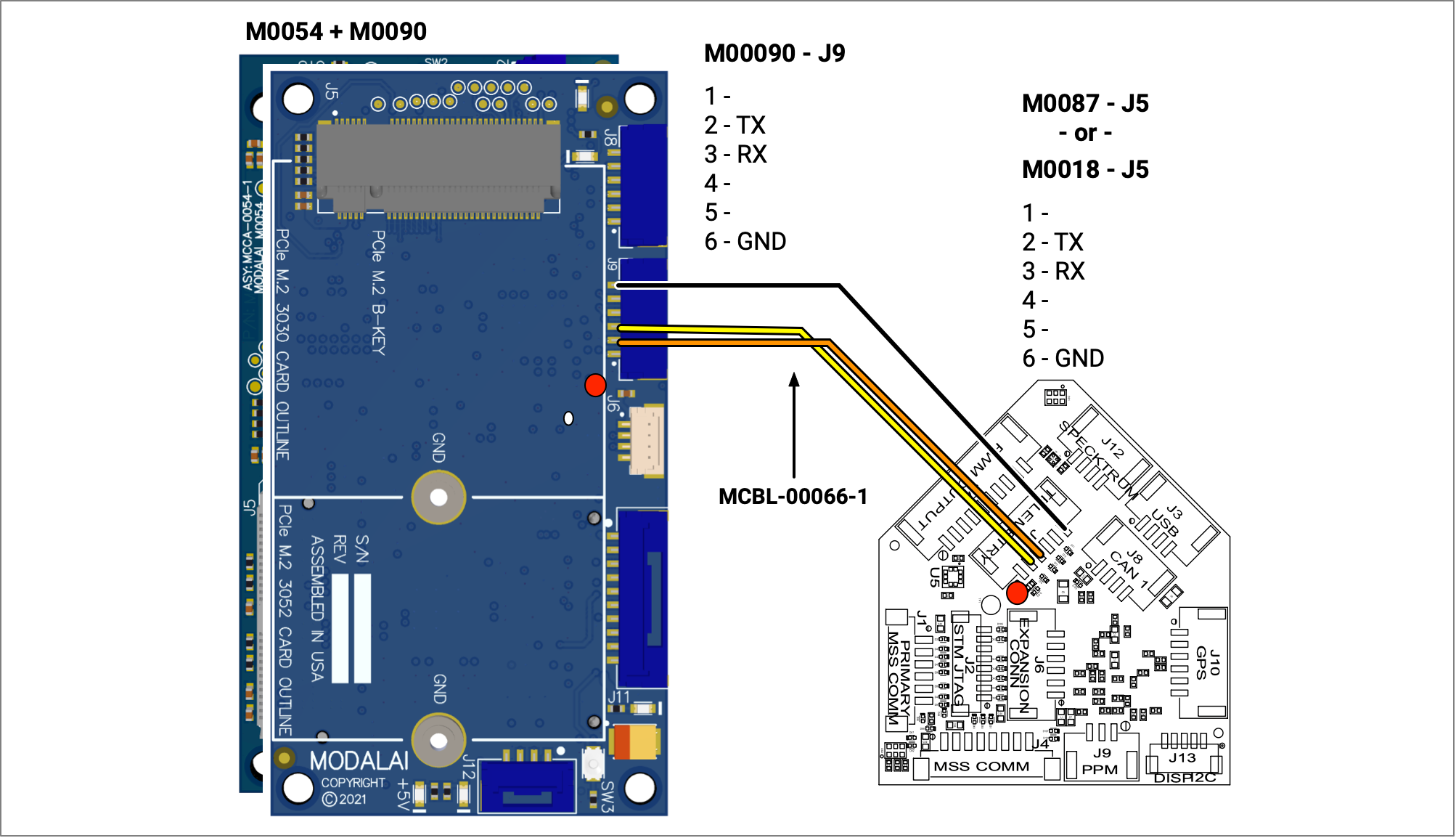
| M0090 J9 | M0018 J5 |
|---|---|
| 1 | |
| 2 TX | 3 RX |
| 3 RX | 2 TX |
| 4 | |
| 5 | |
| 6 | 6 GND |
Using J8 Camera Connector
You will need to use a level shifter likely, as the logic is 1.8V here. VOXL2’s camera group 3 connector can be used with M0076 interposer which has test points you can solder to.
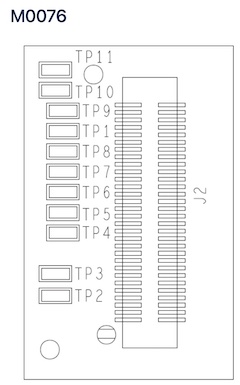
- UART_TX - TP7
- UART_RX - TP8
- VREF 1P8 - TP1
- DGND - TP11
VOXL SDK Software Setup
Component Overview
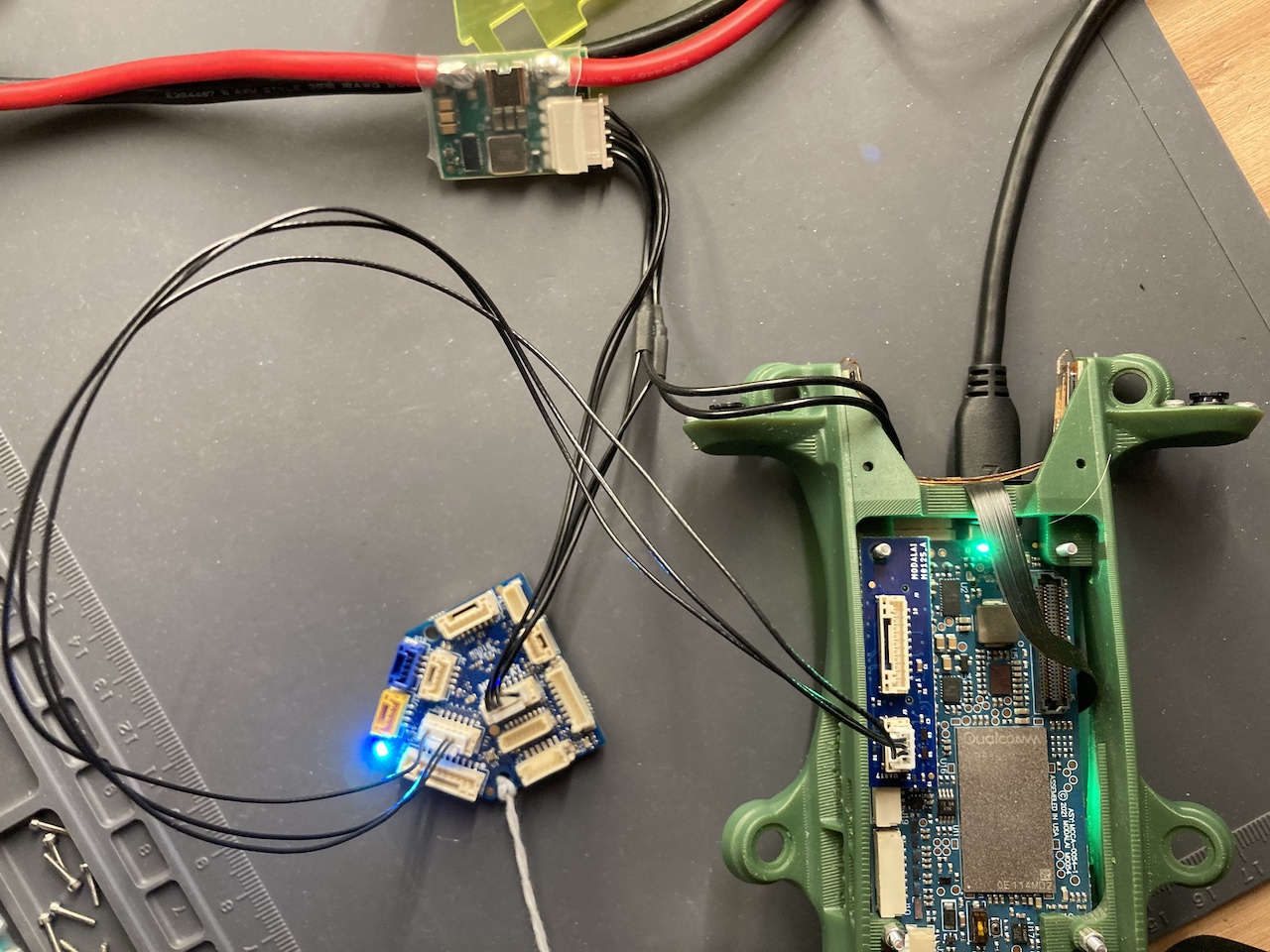
The following image captures the main components in play when using VOXL2 with a USB/UART Addon Board and a Flight Core.
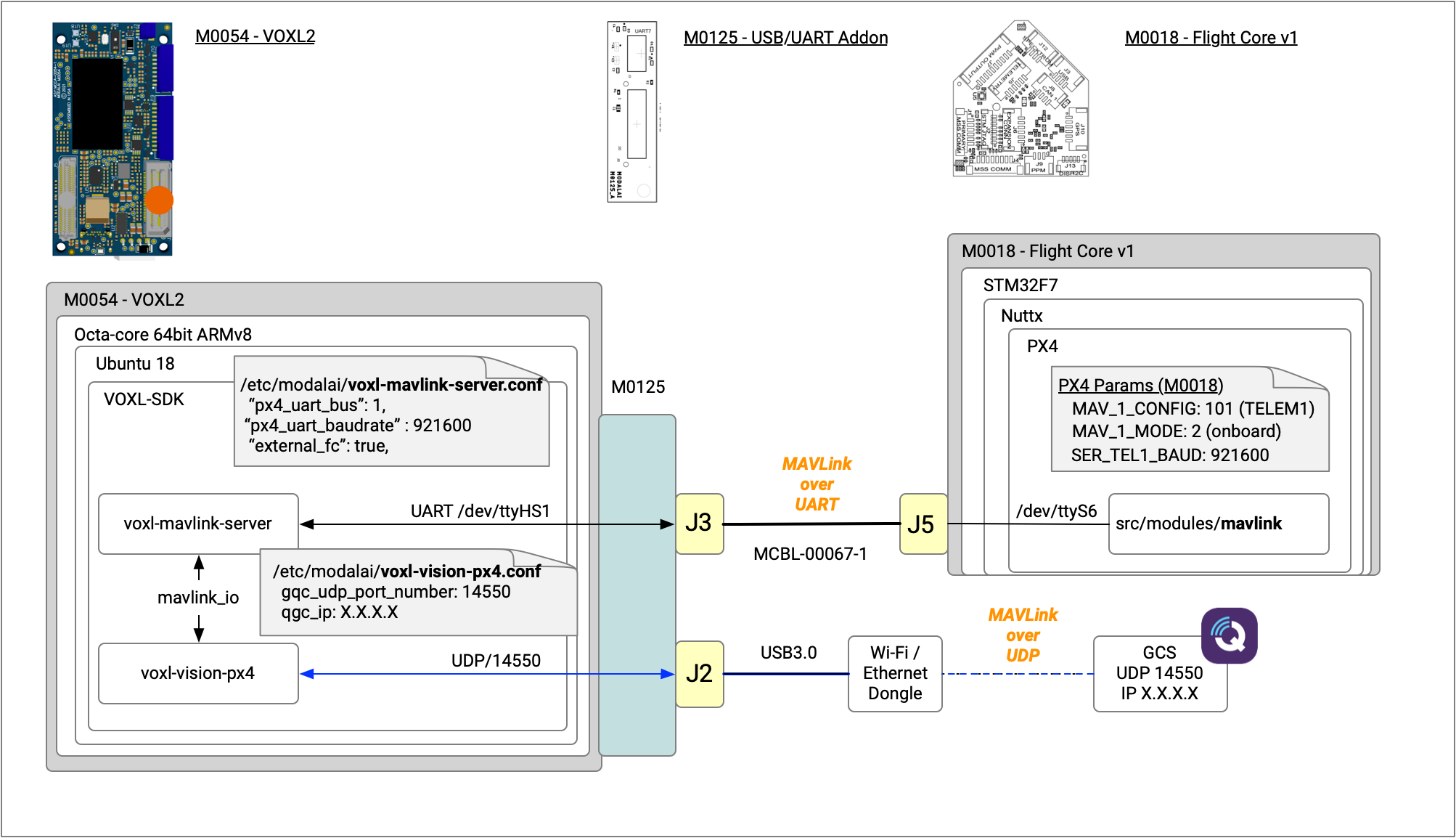
VOXL2 SW Setup
Disable PX4 Running on VOXL2
If you aren’t using PX4 on VOXL 2, you should likely disable it from running on bootup.
adb shell
systemctl disable voxl-px4
Setup voxl-mavlink-server.conf
voxl-mavlink-server ships in the VOXL SDK, if needed, run voxl-configure-mavlink-server to setup. If already setup or to edit manually, locate voxl-mavlink-server.conf. For the px4_uart_bus field, these are current options:
/dev/ttyHS0–> “px4_uart_bus”: 0/dev/ttyHS1–> “px4_uart_bus”: 1/dev/ttyHS2–> “px4_uart_bus”: 2
For px4_uart_baudrate, configure this the same as the MAVLink instance on Flight Core. In this example, we are using 921600.
For external_fc, set to true.
For the PX4 side, on Flight Core v1 (M0018), check the SER_TEL1_BAUD setting if using the hardware setup above (on Flight Core v2 (M0087), check SER_TEL2_BAUD).
Here’s the setup to use if following allong and using M0125 like the picture at the top of this guide.
/**
* voxl-mavlink-server Configuration File
* UART fields are for APQ8096 VOXL1 or QRB5165 VOXL2 with external fc
* UDP fields are for PX4 on SDSP on QRB5165 only
* External FC field is for QRB5165 only
*
*/
{
"px4_uart_bus": 1,
"px4_uart_baudrate": 921600,
"udp_port_to_px4": 14556,
"udp_port_from_px4": 14557,
"external_fc": true
}
Start voxl-mavlink-server
While setting things up, let’s manually start voxl-mavlink-server.
adb shell
voxl2:/$ voxl-mavlink-server
loading our own config file
=================================================================
Parameters as loaded from config file:
px4_uart_bus: 1
px4_uart_baudrate: 921600
udp_port_to_px4: 14556
udp_port_from_px4: 14557
external_fc: 1
=================================================================
Configuring for external flight controller
Successfully opened /dev/ttyHS1
starting receive thread
Init complete, entering main loop
To run this on startup, you can enable using systemctl enable voxl-mavlink-server.
PX4 SW Setup
You need to connect over the USB interface to configure the external flight controller, in this guide’s case the Flight Core v1.
- Connect to QGroundControl over USB and open the parameters.
- On Flight Core (M0018), J5 is mapped to
TELEM1in PX4 (/dev/ttyHS6). For this example to work out of the box, make sure to setSER_TEL1_BAUDto the default baud rate of 921600 if you’ve changed it. - On Flight Core (M0087), J5 is mapped to
TELEM2in PX4 (/dev/ttyHS4), so useSER_TEL2_BAUDinstead.
- On Flight Core (M0018), J5 is mapped to
Check the status of MAVLink instances by opening the MAVLink Console in QGC and running mavlink status:
On Flight Core v1, you should see something like this if using 921600 baud:
instance #1:
mavlink chan: #1
type: GENERIC LINK OR RADIO
flow control: ON
rates:
tx: 81.8 B/s
txerr: 0.0 B/s
tx rate mult: 0.682
tx rate max: 1200 B/s
rx: 20.9 B/s
rx loss: 0.0%
received from sysid: 0 compid: 197: 43, lost: 0, last 343 ms ago
FTP enabled: YES, TX enabled: YES
mode: Normal
MAVLink version: 2
transport protocol: serial (/dev/ttyS6 @921600)
Above is showing you that the Flight Core is communicating with VOXL2 successfully, note tx: 81.8 B/s and rx: 20.9 B/s rates indicate bidirectional traffic.
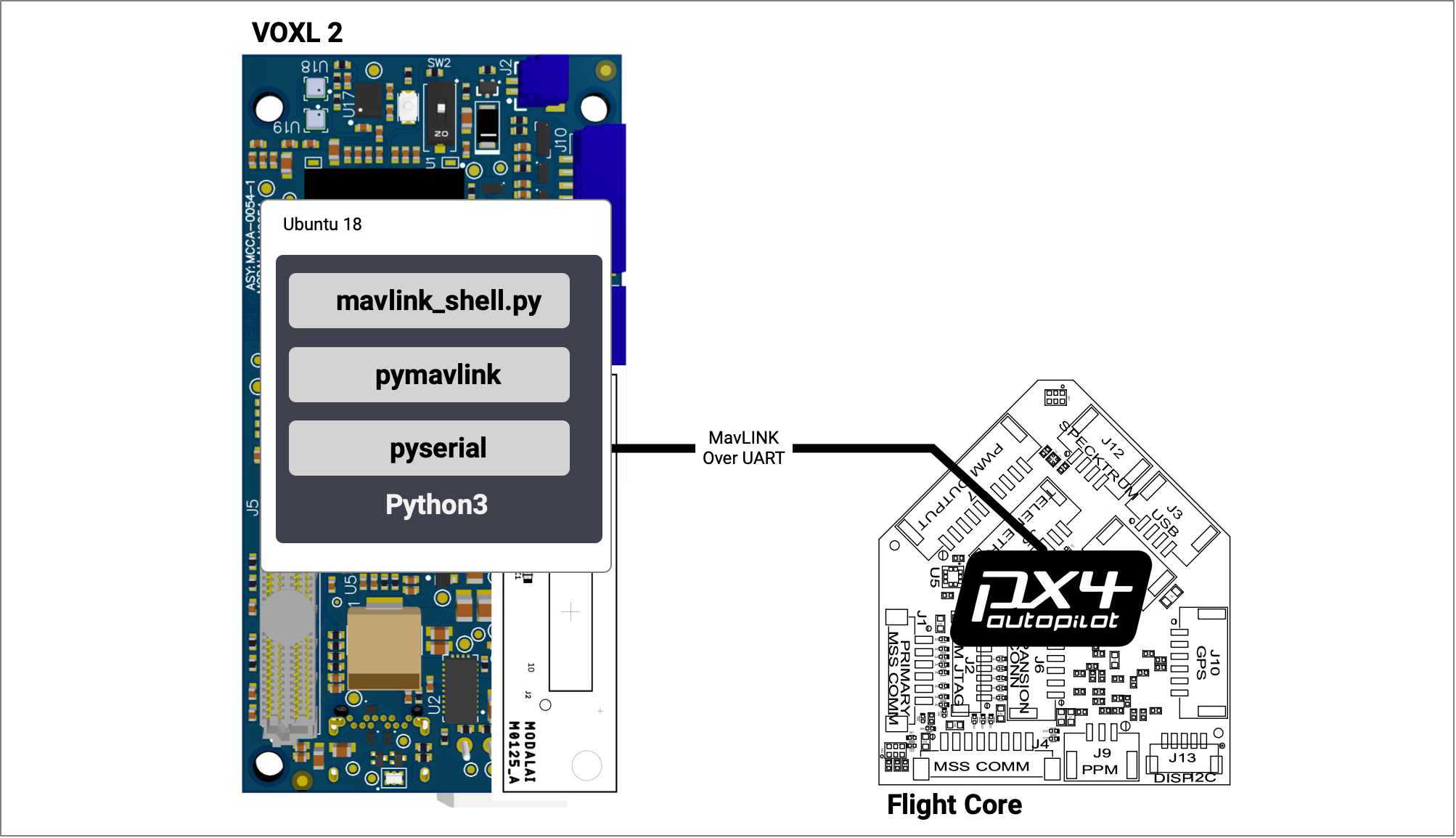
pymavlink Software Based Example
WARNING: This clashes with the example above, so ensure to disable the voxl-mavlink-server if you configured the VOXL SDK.
The SER_TEL1_BAUD/SER_TEL1_BAUD baud rate should be set to 57600 for thi example (for Flight Core v1/v2 respectively).
First, connect VOXL 2 to the internet so we can use apt to install pymavlink. You can connect an ethernet or WiFi dongle to the USB3 port.
Conect to the VOXL 2 over ADB:
adb shell
Now on target:
apt update
sudo apt-get install python3-pip
sudo apt-get install libxml2-dev libxslt-dev python-dev
sudo pip3 install pymavlink pyserial
Get the mavlink_shell.py tool from PX4:
cd /home
wget https://raw.githubusercontent.com/PX4/PX4-Autopilot/main/Tools/mavlink_shell.py
Now, run the program and interact with the Flight Core.
python3 mavlink_shell.py /dev/ttyHS1
Connecting to MAVLINK...
NuttShell (NSH)
nsh> ver all
HW arch: MODALAI_FC_V1
HW type: V106
HW version: 0x00000000
HW revision: 0x00000006
FW git-hash: 7008425b466eba94e35304e502454208d578ba56
FW version: 1.11.3 0 (17498880)
FW git-branch: fcio-v2
OS: NuttX
OS version: Release 8.2.0 (134349055)
OS git-hash: ec20f2e6c5cc35b2b9bbe942dea55eabb81297b6
Build datetime: May 10 2022 18:38:31
Build uri: localhost
Toolchain: GNU GCC, 9.3.1 20200408 (release)
PX4GUID: 0002000000003930353534385109003a002e
MCU: STM32F76xxx, rev. Z