Modal Pipe Architecture
This is an introduction to VOXL’s software architecture!
Overview
ModalAI has built an ecosystem of systemd services for VOXL that run in the background. Paired with a suite of inspect-tools and utilities, a user can easily use these services to achieve high level functionalities like autonomous flight.
These services, tools, and utilities require inter-process communication to function. For example, voxl-qvio-server consumes camera data from voxl-camera-server and IMU data from voxl-imu-server to provide Visual Inertial Odometery (VIO). We use POSIX pipes as the underlying transport mechanism for this inter-process communication due to their robustness, efficiency, and portability.
This combination of services, tools, and pipes that connect between them is what we call the Modal Pipe Architecture (MPA).
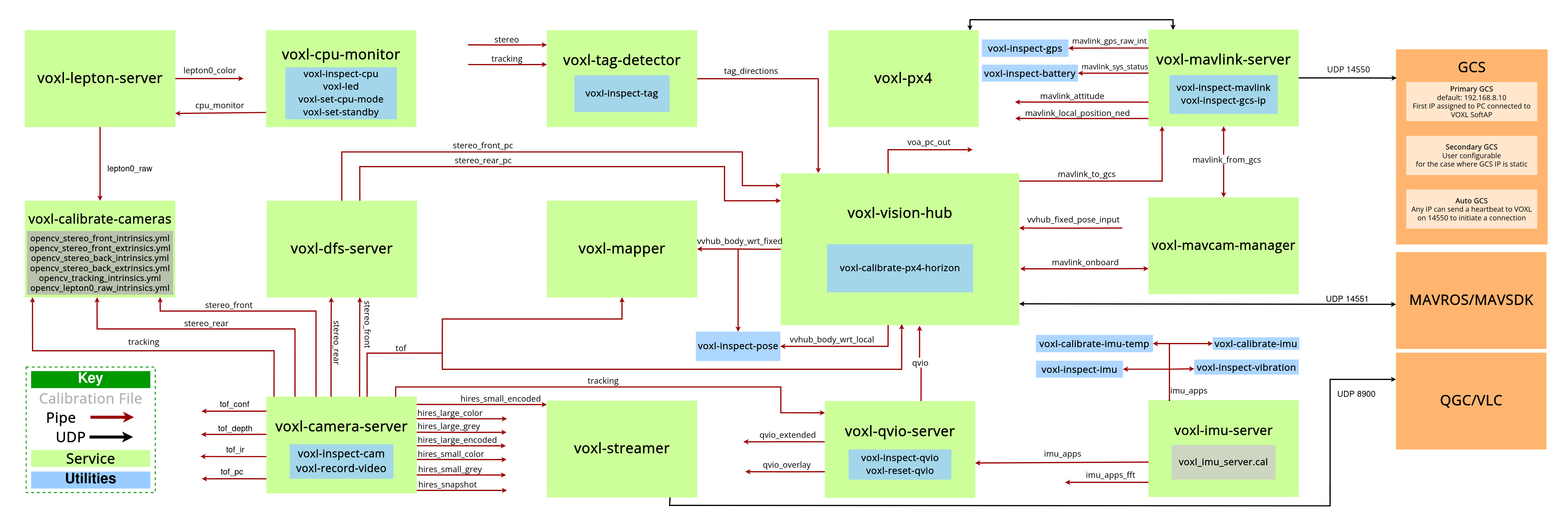
To provide standardization and ease of use, all MPA services use the C/C++ library libmodal_pipe to create, publish, and subscribe to MPA data. A single process can also be both a server and a client to multiple pipes.
You can see every data-type that is being passed through pipes here: modal_pipe_interfaces.h.
Note: You can find a comprehensive list of all services on the Gitlab: https://gitlab.com/voxl-public/voxl-sdk/services?page=1
Using Services
Services can be manually started and stopped with the following systemd commands:
voxl2:/$ systemctl start SERVICENAME
voxl2:/$ systemctl stop SERVICENAME
These services can also be configured to activate (or deactivate) on boot, using the following commands:
voxl2:/$ systemctl enable SERVICENAME
voxl2:/$ systemctl disable SERVICENAME
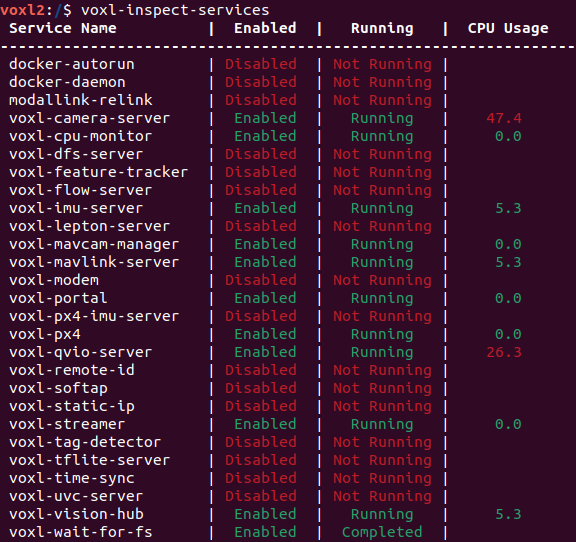
voxl-inspect-services is a simple tool to show which services are enabled (start on boot), running, and what their cpu usage is (if running). The CPU usage should be taken with a grain of salt, as it a momentary snapshot of CPU usage. We recommend using the command top for more accurate process-specific cpu utilization.
Typical Use
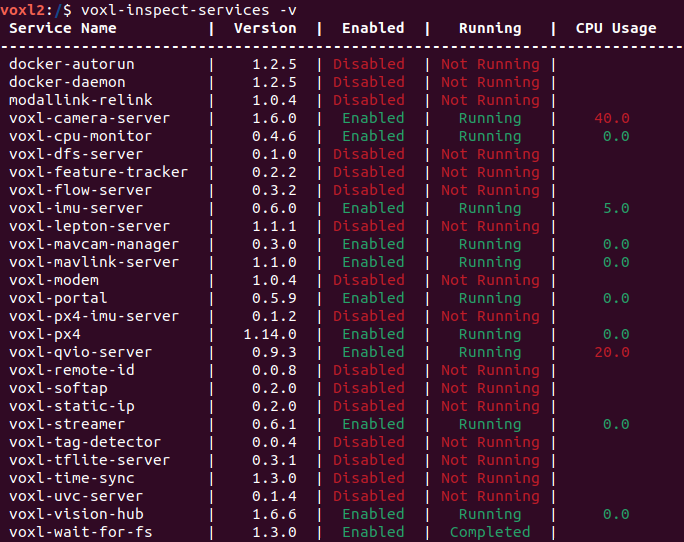
Optionally Show Version Numbers
The version column is disabled by default since the version number lookup is slow compared with the default three columns. However, it can be enabled with the -v or --version flag
Source code available on Gitlab.
MAVROS and MAVSDK are out of the scope of this Bootcamp, but you can read more about them in the SDK section of the docs.
Tools and Utilities
To learn about some basic MPA tools and utilies, see the next page.
Next: Basic Tools and Utilities