VOXL PX4 User Guide
Table of contents
- Introduction
- Hardware
- Software
Introduction
«««< HEAD voxl-px4 is a service that runs on the apps processor (ie CPU) on VOXL 2 that handles the CPU-side PX4 processing, launches the sDSP PX4 RTOS implementation, and handles the communication between CPU and sDSP.
If you are interested in developing for the sDSP, see the VOXL 2 PX4 Developer Guide and VOXL 2 PX4 Build Guide
Block Diagram
======= This guide is for voxl-px4 as shipped in VOXL 2 and VOXL 2 Mini Platform Release 1.0 and newer running 1.14 based PX4.
documentation/master
voxl-px4 is a service that runs on the apps processor (ie CPU) on VOXL 2 and VOXL 2 Mini that handles the CPU-side PX4 processing, launches the sDSP PX4 RTOS implementation, and handles the communication between CPU and sDSP.
If you are interested in developing for the sDSP, see the VOXL 2 PX4 Developer Guide and VOXL 2 PX4 Build Guide
Hardware
Supported Devices
The voxl-px4 package is supported on the following platforms:
- VOXL 2 Mini (board ID
M0104) - VOXL 2 (board ID
M0054) - RB5 Flight (board ID
M0052)
This guide is geared towards someone trying to use the PX4 system, and not necessarily interested in all the bits and bytes that make it work. If you want to know the inner workings, please see the VOXL PX4 Developer Guide
Hardware Block Diagrams
Below are hardware block diagrams that show the VOXL 2 and VOXL 2 Mini in supported architectures used to facilitate robotics applications. Many other variations are possible.
VOXL 2 Mini Based Setup
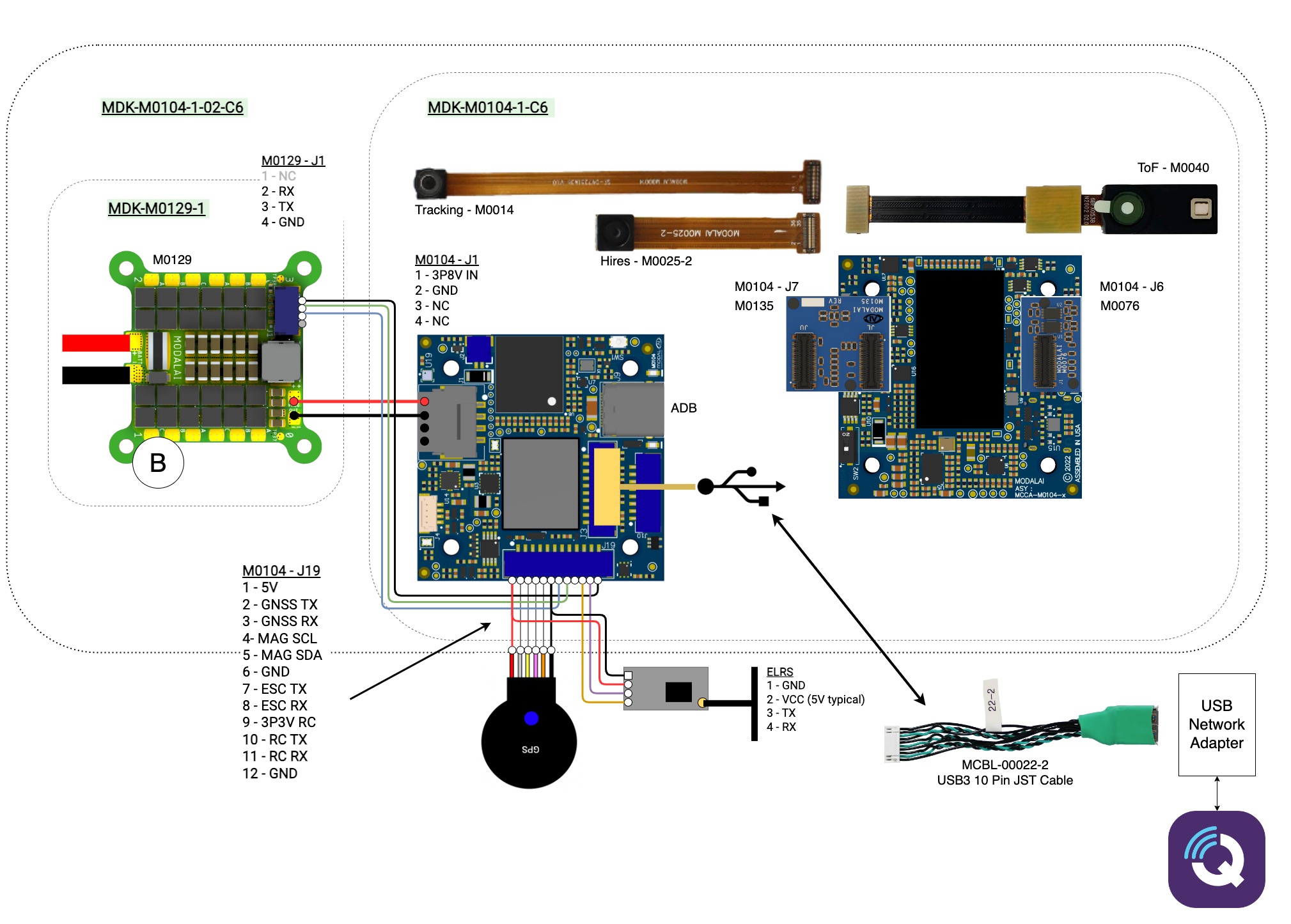
Minimum Setup Option
Minimum requirements are (e.g. to play around at your desk)
Setup to Connect to Ground Control Station
Additionally/Optionally (e.g. to connect to Ground Control Station):
VOXL 2 Based Setup

Minimum Setup Option
Minimum requirements are (e.g. to play around at your desk)
- VOXL 2 Development Kit (MDK-M0054-1-01)
- VOXL 2 (MDK-M0054-1-00)
- VOXL Power Module (MDK-M0041-1-B-00)
- Power cable (MCBL-00001-1)
- Power supply 12V 3A ((MPS-00005-1), XT60) (or 2S-6S battery)
- Note: inrush current on bootup requires 30W power supply min, nominally ~8W at runtime in beta
- Host PC with Android Debug Bridge
- USBC cable
Setup to Connect to Ground Control Station
Additionally/Optionally (e.g. to connect to Ground Control Station):
- Add-on board for networking:
- USB Expansion Board (M0017) + JST-to-USB cable (MCBL-00009-1) + Ethernet or Wi-Fi dongle
- 5G Modem Add-on (M0090-3-01) + your own VPN
- Microhard Modem Add-On (M0048-1)
Setup for Bringup and Manual Flight
Additionally/Optionally (e.g. to fly manual modes, testing and bringup):
- ModalAI 4-in-1 UART ESC (M0049)
- GPS/Mag/Spektrum RC input wiring harness (MSA-D0006-1-00) - or make your own 12-pin JST GH connector (pinouts)
- the actual GPS/Mag/Spektrum RC* receiver hardware
- Frame/Motors/Props/etc
Note: only Spektrum receivers supported in beta
ESC Configs
Information about ESC configs:
RC Configs
Information about RC configs:
Onboard Sensors
Information about onboard sensors:
Offboard Sensors
Information about offboard sensors:
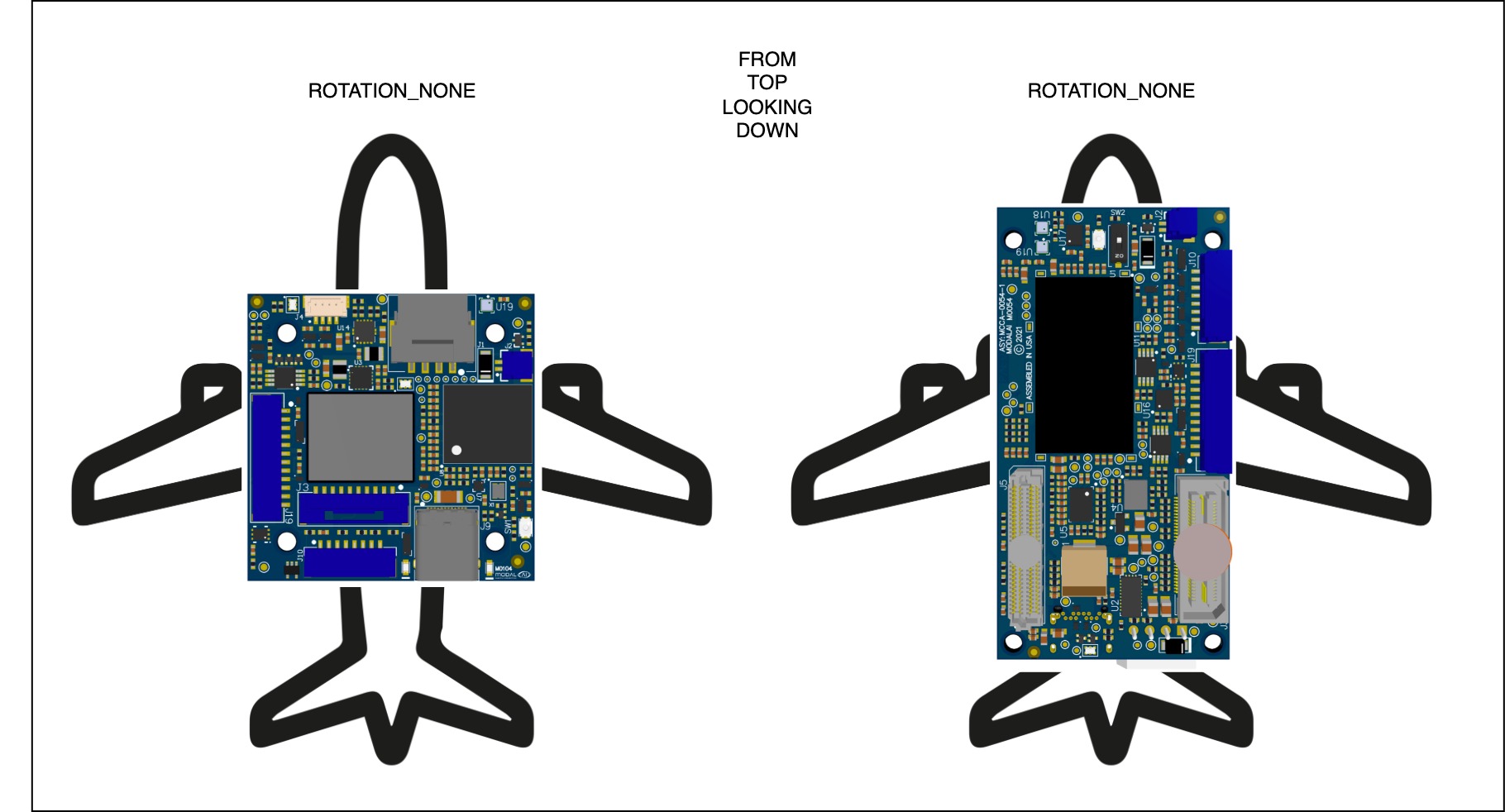
Autopilot Orientation
Below are the default autopilot orientations. To update for your setup, use the SENS_BOARD_ROT parameter or configure using a Ground Control Station like QGC.
Software
Key PX4 Differences to Note
- PX4 installation and updates are installed on the companion computer via the
aptpackage manager (not QGroundControl) - Currently, the USBC connection does not support a connection to QGroundControl
- Natively, ESCs are control is via UART, if you need PWM, check out voxl2-io
- the MAVLink shell available through QGC doesn’t currently work on VOXL 2. Instead, use the USBC connection and adb to access the shell if needing to run commands
Enable voxl-px4 Daemon
Connect to VOXL2 / VOXL 2 Mini over USB/adb (see here) and run the following helper:
voxl-configure-px4 factory_enable
Example output from running command for reference:
voxl2-mini:/$ voxl-configure-px4 factory_enable
enabling voxl-px4 systemd service
Created symlink /etc/systemd/system/multi-user.target.wants/voxl-px4.service → /etc/systemd/system/voxl-px4.service.
Done configuring voxl-px4
Reboot VOXL 2 / VOXL 2 Mini from the host computer.
adb reboot
px4 Commands
After rebooting, voxl-px4 will run on bootup if the service is enabled (like we did in the last step).
With the voxl-px4 daemon running, you can run some common PX4 commands like “listener” with a px4- prefix.
For example, px4-listener sensor_accel shows the following output:
voxl2-mini:/$ px4-listener sensor_accel
TOPIC: sensor_accel
sensor_accel
timestamp: 4963582637 (9.119637 seconds ago)
timestamp_sample: 4963582379 (258 us before timestamp)
device_id: 2490378 (Type: 0x26, SPI:1 (0x00))
x: -0.26791
y: -0.06608
z: 9.83514
temperature: 35.03019
error_count: 1
clip_counter: [0, 0, 0]
samples: 10
voxl-mavlink-server Daemon
Enable Daemon
voxl-px4 communicates over IP to the outside world using the voxl-mavlink-server daemon. To enable, run the following:
voxl-configure-mavlink-server factory_enable
Example output from running command for reference:
voxl2-mini:/$ voxl-configure-mavlink-server factory_enable
wiping old config file
Created new json file: /etc/modalai/voxl-mavlink-server.conf
enabling voxl-mavlink-server systemd service
Done configuring voxl-mavlink-server
IP Connection
- To get an IP link on VOXL 2, see here
- To get an IP link on VOXL 2 Mini, see here for options to get a USB connection going, and use some network adapter like a WiFi dongle (e.g.
awus036acs).
Note: the adb connection does not pass IP traffic and can’t be used for this link.
GCS Connection using WiFi - Using SoftAP
If using a WiFi dongle, an easy way to get a connection going is to setup VOXL 2 / VOXL 2 Mini as a Soft AP (access point) and have your host computer connect wirelessly to it.
When in this mode, VOXL 2 Mini will provide your host PC an address of 192.168.8.10 by default.
The default IP address voxl-mavlink-server will use for the main connection to GGC.
So by default, a connection between VOXL 2 / VOXL 2 Mini and your GCS should be facilitated in this mode.
GCS Connection using WiFi Station Mode or Ethernet Adapter
If using WiFi in Station Mode or an Ethernet Adapter, connect VOXL 2 / VOXL 2 Mini to the same network as your GQC and update the configuration file’s primary_static_gcs_ip field at /etc/modalai/voxl-mavlink-server.conf
PX4 Parameters
Default Parameters
The default params for voxl-px4 are configured here
Upon first time run, these are the params that are configured.
Viewing/Editing Parameters
You can use the param subsystem to interact with the parameters, e.g. viewing:
px4-param show