Hardware
Supported Devices
The voxl-px4 package is supported on the following platforms:
- VOXL 2 Mini (board ID
M0104) - VOXL 2 (board ID
M0054)
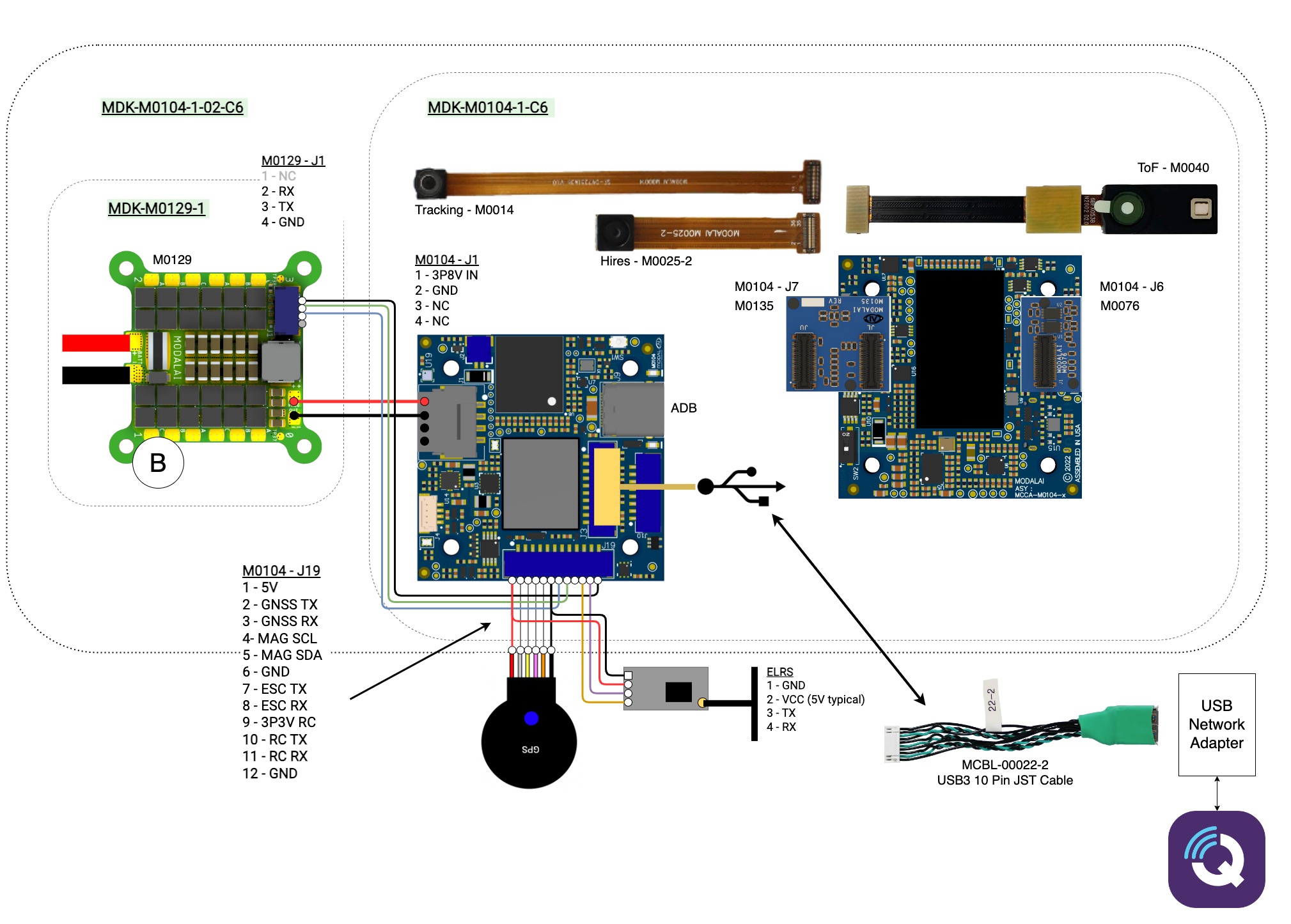
Hardware Block Diagrams
Below are hardware block diagrams that show the VOXL 2 and VOXL 2 Mini in supported architectures used to facilitate robotics applications. Many other variations are possible.
VOXL 2 Mini Based Setup
Minimum Setup Option
Minimum requirements are (e.g. to play around at your desk)
Setup to Connect to Ground Control Station
Additionally/Optionally (e.g. to connect to Ground Control Station):
VOXL 2 Based Setup

Minimum Setup Option
Minimum requirements are (e.g. to play around at your desk)
- VOXL 2 Development Kit (MDK-M0054-1-01)
- VOXL 2 (MDK-M0054-1-00)
- VOXL Power Module (MDK-M0041-1-B-00)
- Power cable (MCBL-00001-1)
- Power supply 12V 3A ((MPS-00005-1), XT60) (or 2S-6S battery)
- Note: inrush current on bootup requires 30W power supply min, nominally ~8W at runtime in beta
- Host PC with Android Debug Bridge
- USBC cable
Setup to Connect to Ground Control Station
Additionally/Optionally (e.g. to connect to Ground Control Station):
- Add-on board for networking:
- USB Expansion Board (M0017) + JST-to-USB cable (MCBL-00009-1) + Ethernet or Wi-Fi dongle
- 5G Modem Add-on (M0090-3-01) + your own VPN
- Microhard Modem Add-On (M0048-1)
Setup for Bringup and Manual Flight
Additionally/Optionally (e.g. to fly manual modes, testing and bringup):
- ModalAI 4-in-1 UART ESC (M0049)
- GPS/Mag/Spektrum RC input wiring harness (MSA-D0006-1-00) - or make your own 12-pin JST GH connector (pinouts)
- the actual GPS/Mag/Spektrum RC* receiver hardware
- Frame/Motors/Props/etc
ESC Configs
Information about ESC configs:
RC Configs
Information about RC configs:
Onboard Sensors
Information about onboard sensors:
Offboard Sensors
Information about offboard sensors:
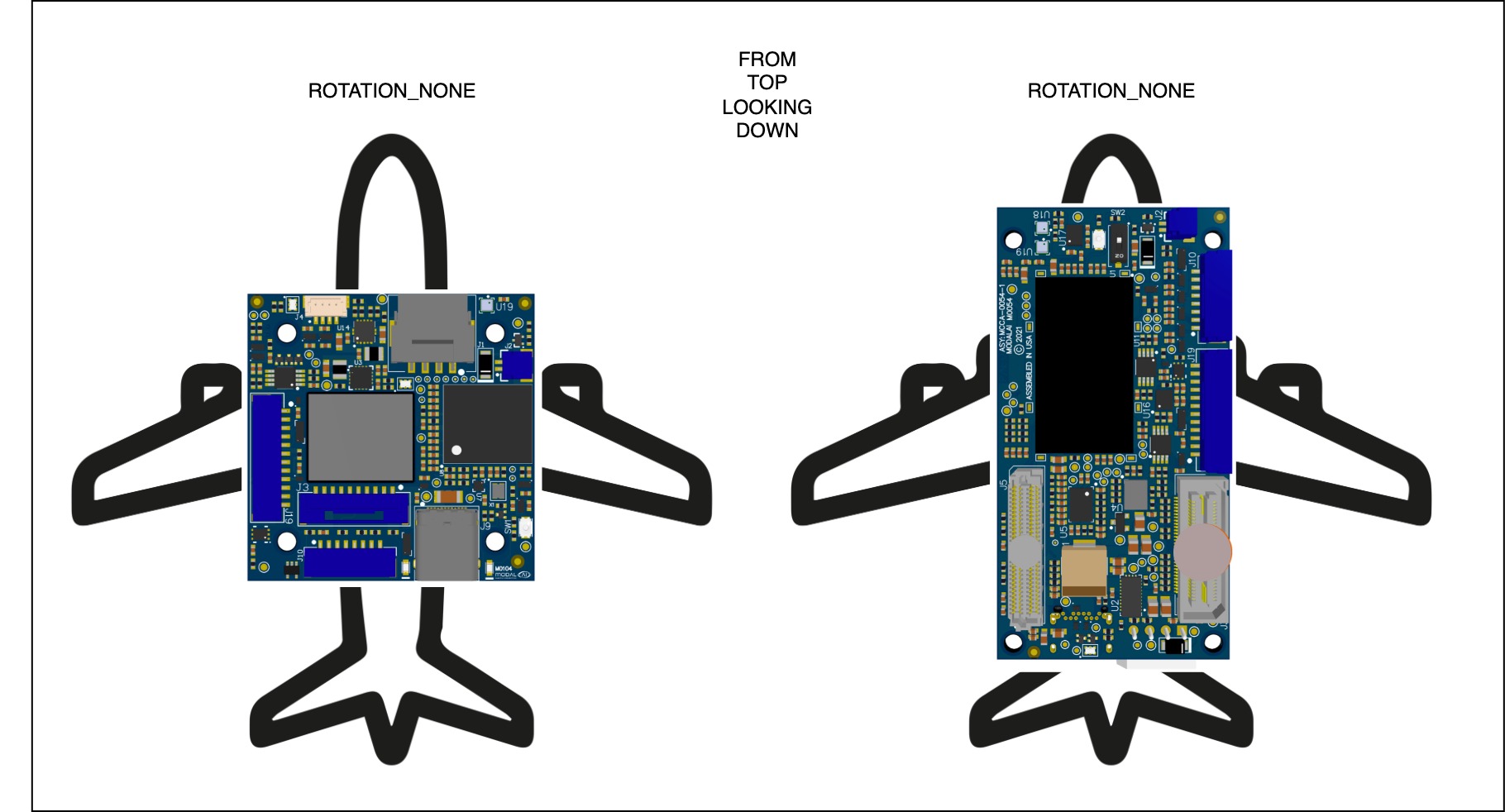
Autopilot Orientation
Below are the default autopilot orientations. To update for your setup, use the SENS_BOARD_ROT parameter or configure using a Ground Control Station like QGC.