Overview
In this section, we will show you how to fly a mission outdoors without GPS. The drone uses Visual Inertial Odometry (VIO) as outlined in this VOXL Vision manual. The following video demonstration shows an m500 drone that loses GPS during a mission (GPS-denied environment), then solely using vision continues the mission returning to the launch site.
Note: This feature is still in beta. Our team is currently testing PX4 GPS and Vision fusion to ensure stability. Please exercise caution when experimenting with this outdoor drone configuration.
Set-Up
1. PX4 Firmware
In our testing, we’re currently using ModalAI PX4 Firmware v1.10.
2. VOXL Vision
Ensure you have VOXL Vision ready following the installation in this manual.
3. PX4 Parameters
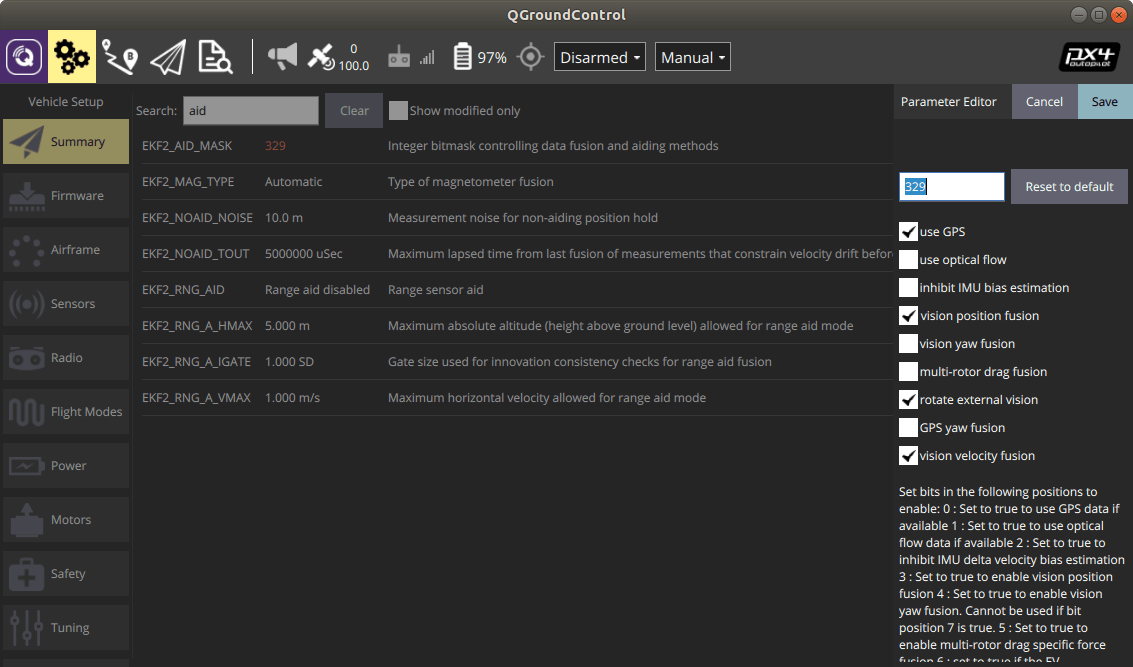
Update the EKF2_AID_MASK. After you update the mask, the values should add up to 329:
4. Initialization Procedure
To ensure vision system is stable (during beta testing), take-off with the drone in manual mode about 3 meters off of the ground. Hover for approximately 30 seconds then transition into position mode. This will merge vision and GPS giving the drone a starting GPS LAT/LON that can be interpolated by the vision system once GPS is no longer available.
5. Disable GPS
Disable GPS using the MAVLink Nuttx console. You can follow the Nuttx console section in this manual or run gps stop in QGroundControl:
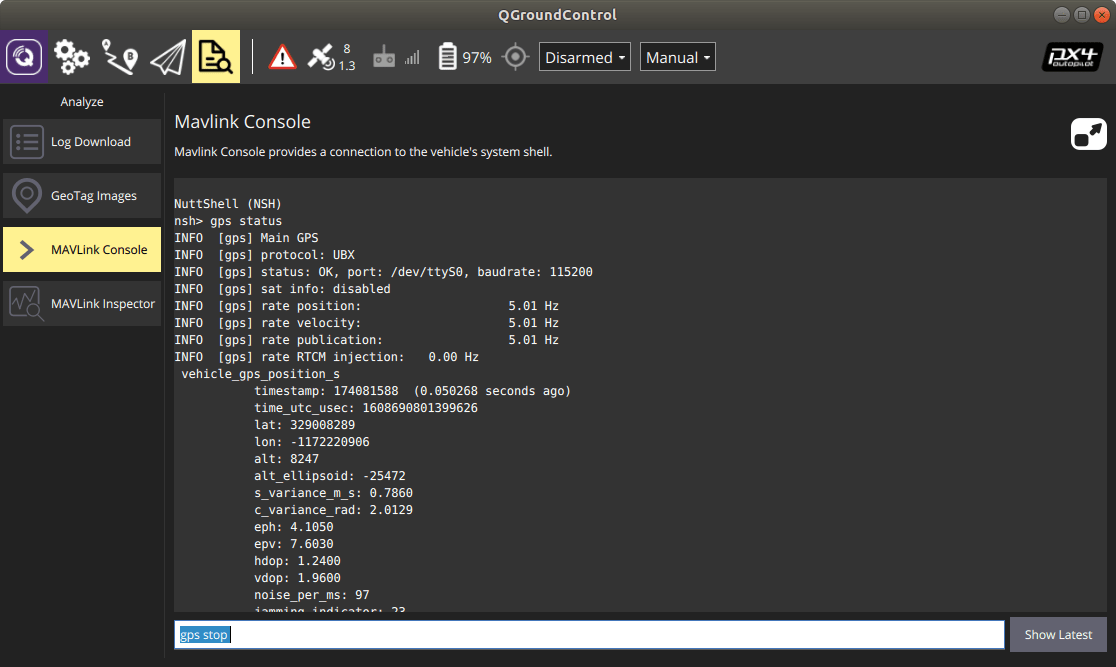
Once GPS stops, LAT/LON will no longer update in QGroundControl. The drone will now solely use vision with initialized GPS coordinates.
6. Start Mission
In the video demo, we used vision as a failsafe simulating a GPS-denied environment. From here you can start or resume a mission.